
 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114ZN-WS2400型 大型特种车驾驶模拟训练系统
一、硬件结构组成
1、实验室布置简介:
军用特种运输车驾驶模拟器实训室内部根据功能进行分区,共四个区域:隔离区、模拟区、实验观测控制区和展板区。
隔离区:由遮光板和遮光布组成,实现有效的遮光及准备功能;
模拟区:由投影幕(实现180°视角)、实车模拟器、投影系统及视景处理系统组成,实现高仿真的驾驶模拟;
实验观测控制区:由实验台、实验座椅、观察系统和电控系统组成,实现实车模拟控制、观测及数据记录、分析等功能。
2、实验室功能介绍:
视景系统信号输出流程:视景计算机—>融合器—>投影机。采用1台视景计算机生成3072*768分辨率的图像,并通过三分屏输出。
视景与驾驶操作互动需要采集车辆内部操作信息,并作用于视景,形成联动。
投影机采取吊装直接安装至室内顶棚,可以便于取电,并固定较为稳定,但不宜维护和拆装。
视景计算机需要时时计算三维场景输出图像,此项工作主要有显卡完成,因此对于显卡的显存及GPU的运算能力有较高要求。该项指标直接影响系统输出图像的帧率和画面流畅性,因此选用计算一显卡为主。音响系统包括车辆碰撞音效,刹车音效,行人事故等。
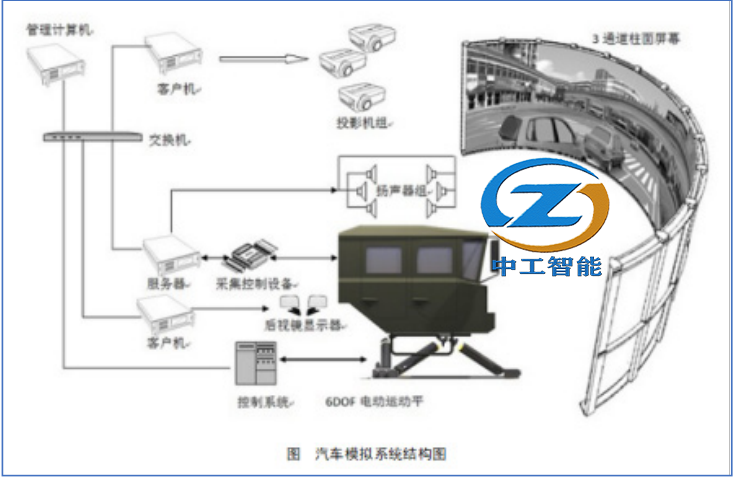
3、整机组成为:
驾驶舱、环形柱幕、投影机、融合软件、服务器、客户机、六自由度机电动感平台、六自由度机电动感平台控制柜、控制台、打印机及相关配件等组成(见下图)。
4、驾驶舱:
ZN-WS2400型 大型特种车驾驶模拟训练系统驾驶舱选配真实车“WS2400车型驾驶室总成”为模拟驾驶舱,使模拟驾驶操控完全达到实车效果。模拟器座舱由“WS2400车型驾驶室总成实车改装,包括数据采集CAN总线控制板,数据输出(例如仪表盘)CAN总线控制板,力反馈控制系统,各信号传感器等组成。方向盘电动助力改装方向盘力反馈系统。实现CAN总线控制和电动助力控制。

5、控制台:
应包括控制台台体、显示屏、计算机(服务器、客户机)、打印机、交换机、键盘、鼠标、音箱、无线话筒等。
应包括控制台台体、显示屏、计算机(服务器、客户机)、打印机、交换机、键盘、鼠标、音箱、无线话筒等。

(1)控制台外廓尺寸(长×宽×高,mm):1600×1150×1270(±1%)
(2)计算机配置:见表1
表1 计算机主要配置表
(3)环境适应性: a工作环境温度:0~+40°C。 b贮存极限温度:-10℃,+55℃
c湿度:≤90%RH(不结露)
6、动感平台:
动感汽车驾驶模拟器虚拟仿真驾驶模拟器平台以六自由度并联机构作为驾驶舱操纵仿真系统,能够实现驾驶舱对仿真图形的快速、稳定的反映,通过模拟驾驶舱和计算机实时生成汽车行驶过程中的虚拟视境、音响效果和运动仿真等驾驶环境, 以视景仿真管理软件实现虚拟环境的“沉浸感、交互性”特性,为驾驶人提供了在坡路、颠簸路面等以及车辆加减速、转向、侧滑时的运动临场感,同时能够针对轿车、货车、客车等各类车型进行包括临界、极限工况的全工况仿真实验,分析、预估和评价汽车的操纵稳定性、安全性、制动性、动力性和燃油经济性,对汽车运动性能控制系统进行仿真、评价、预测和优化,提供车型结构参数匹配的*优化方案等,动感平台参数:
(2)计算机配置:见表1
表1 计算机主要配置表
| 名称 | 主要配置 | 用途 |
| 服务器 |
不能低于以下配置: (1)台式机 1 台;(2)CPU 3GHz,8 核;(3)硬盘 500GB;d)内存 16GB;(4) 显卡 GPU1014MHz 以上,显存 6GB,位宽 512bit。 |
图像渲染,数据计算 |
| 客户机 |
不能低于以下配置: (1)台式机 2 台;(2)CPU 3GHz,8 核;(3)硬盘 500GB;(4)内存 16GB(双内存);(5)主板支持双显卡,显卡GPU 1014MHz 以上,显存 4GB,位宽 256bit。 |
图像渲染 |
c湿度:≤90%RH(不结露)
6、动感平台:
动感汽车驾驶模拟器虚拟仿真驾驶模拟器平台以六自由度并联机构作为驾驶舱操纵仿真系统,能够实现驾驶舱对仿真图形的快速、稳定的反映,通过模拟驾驶舱和计算机实时生成汽车行驶过程中的虚拟视境、音响效果和运动仿真等驾驶环境, 以视景仿真管理软件实现虚拟环境的“沉浸感、交互性”特性,为驾驶人提供了在坡路、颠簸路面等以及车辆加减速、转向、侧滑时的运动临场感,同时能够针对轿车、货车、客车等各类车型进行包括临界、极限工况的全工况仿真实验,分析、预估和评价汽车的操纵稳定性、安全性、制动性、动力性和燃油经济性,对汽车运动性能控制系统进行仿真、评价、预测和优化,提供车型结构参数匹配的*优化方案等,动感平台参数:
(1)应包括机械构件、电动伺服系统、控制柜及元件(含平台姿态控制驱动程序)等;
(2)应包括上承载平台、下固定底座、上下连接铰链等机械构件;
(3)应包括电动缸、螺母丝杠、伺服电机、齿轮及同步带等;
(4)控制柜应设有平台初始化操作、平台电源控制、故障紧急处理、电源启闭及故障报警提示等装置,包括:平台姿态控制驱动程序和与大型特种车驾驶模拟训练系统软件的接口;
(5)应具有俯仰、横滚、偏航、纵向平移、侧向平移、垂直位移,即沿 x、y、z 轴移动和绕 x、y、z 轴转动 6 个自由度;
(6)应能模拟虚拟车辆在不同运动条件下的运动感觉,如加减速、制动、左右转弯、上下坡道、路面颠簸、撞击等;
(7)承载质量(kg):≥800;
(8)动感平台中位高度(mm):850;
(9)动感平台外廓尺寸(长×宽×高,mm):1850×1820×700(±1%);
(10)控制柜外廓尺寸(长×宽×高,mm):700×500×1700(±1%);
(11)电源电压(V):220±10%(50±2Hz);
(12)动感平台位移量:沿x、y、z 轴向线位移(mm):≥±150,绕 x、y、z 轴旋转角位移(rad):≥±0.26;
(13)动感平台速度:沿 x、y、z 轴向线速度(mm/s):≥± 400,绕 x、y、z 轴旋转角速度(rad/s):≥± 0.35;
(14)动感平台加速度:沿 x、y、z 轴向线加速度(m/s2):≥± 9.8,绕 x、y、z 轴旋转角加速度(rad/s2):≥± 2.1;
(15)应含动感平台姿态控制驱动程序,程序操作简洁、界面友好,具有自检、调试、故障报警和一键自动恢复功能;
(16)动感平台与大型特种车驾驶模拟训练系统软件之间的接口应符合要求。
7、环幕投影:
180度柱形投影方案:视景计算机—融合器—投影机方案,使用1台视景计算机生成3072*768分辨率的图像,并通过三分屏输出,通过融合器到投影机投射到弧形幕。视景与驾驶操作互动需要采集车辆内部操作信息,并作用于视景,形成联动。标准的汽车驾驶虚拟方案,提供的高端的投影机(配置不低于:投影安装方式:正投、吊装;显示分辨率(pix):1280×1024 ;亮度(lm):≥4000;(灯泡寿命(h):≥3000。),虚拟现实显示效果好,不易导致眩晕,且运行可靠,易于升级,实现180°视角的视景系统。后视镜采用投影幕生成画面,实车反光镜反射至人眼成像方式实现。效果好,易于图像控制和分析。投影机采取吊装方式:安装至室内顶棚,可以便于取电,并固定较为稳定。
环形柱幕参数要求
(1)环形柱幕尺寸(弧长×高,mm):10000×2650(±1%);
(2)环形柱幕半径(mm):≥3300;
(3)屏幕厚度(mm):≥3;
(4)环形柱幕弧长对应的中心角(°):≥155;
(5)环形柱幕中点到上下边缘之间的夹角(°):≥38;
(6)环形柱幕幕布颜色:白色;
(7)拼接缝隙:无;
(8)屏幕材质:聚碳脂或满足投影要求的其它材质;
(9)安装结构:框架式;
(10)投影机吊装后投射到环幕上的显示面积两两之间应重合≥128 pix;
(11)环幕投影与大型特种车驾驶模拟训练系统软件之间的接口应符合要求。
二、软件要求
1、软件环境:
采用Windows7 或兼容操作系统,采用国产兼容运行环境、图像融合软件、大型特种车驾驶模拟训练系统软件数据库管理系统采用Microsoft SQL Server 2000 或以上兼容数据库管理系统。系统采用MultiGen-Paradigm公司的*主要的工业软件Vega Prime(以下简称:VP)。用于实时视觉模拟、虚拟现实和普通视觉应用。Vega将先进的模拟功能和易用工具相结合,对于复杂的应用,能够提供便捷的创建、编辑和驱动工具。VP 提供真正跨平台、可扩展的开发环境,来高效创建和配置视景仿真、城市仿真、基于仿真的训练、通用可视化应用。它既具有强大的功能来满足当今*为复杂的应用要求,又具备高度的易用性来提高效率。VP基于VSG(Vega Scene Graph——MPI 公司先进的跨平台场景图形API,底层(OpenGL),同时包括Lynx Prime GUI (用户图形界面)工具,让用户既可以用图形化的工具进行快速配置,又可以用底层场景图形API 来进行应用特定功能的创建。它将先进的功能和良好的易用性结合在一起,帮助用户快速、准确地开发实时三维应用,加速成果的发布。
2、系统软件功能要求
(1)导控功能:应具有模拟训练与考核的导调、控制功能。
(2)训练功能:应实现受训人员进行道路、场地课目、常见故障等驾驶模拟训练;完成汽车分队多车型之间的协同训练。
(3)考核功能:应实现受训人员进行场地课目的驾驶考核、成绩评定和管理。应可任意选择组合考核课目;应设有补考选项,可进行补考;应能根据考核情况,结合教练员主观评判,给出综合成绩,并能完成查询、报表打印功能。
3、系统软件性能要求
(1)仿真车型库:应有不少于 3 种典型大型特种车虚拟车辆模型,其中须有 5 轴及其以上汽车和半挂汽车列车虚拟车辆模型。应具有良好的扩展性,可根据需求方的实际需要进行个性化车型定制。
(2)仿真场地库:应有不少于 2 个典型大型特种车训练场的虚拟场景。其中,场地训练科目应满足司机训练与考核大纲的要求:应具有良好的扩展性,场景包括(但不限于):a)设有单边桥、隧道、掩体、错位小巷、高架桥、“8”字路、“S”型路、铁路平车、直角转弯、“N”字路、弧线倒车、直线倒车、倒车移位、侧方停车、渐窄门等训练课目;b)设有快速路、卵石路、横断路、盘山路等常见道路场景,并设有滑坡、落石等模拟障碍物可根据需求方的实际需要进行个性化场地定制。
(3)仿真天候:应包括晴、雨、雪、雾和夜间等常见模拟天候环境。在不同环境下,路面应具有相应的动力学特性。
(4)驾驶感知:A、视觉感知:应实现多通道图像输出,包括:前方视景、视镜、监视和向导界面。应能开启/关闭远光灯、近光灯、转向灯、制动灯等,灯光控制应能根据实际车型而确定。软件画面连续播放帧率应大于等于 50 帧/秒。B、听觉感知:应能实时模拟车辆运行过程中车辆和交通环境的声音效果;应具有点火、加速、碰撞音效及犯规提示语音。C、操纵感知:软件能实时采集加速踏板、制动踏板、离合踏板、挡位、转向盘、仪表面板等操作信号,并正确驱动虚拟车辆运行, 其操纵感知应与实车相似。D、运动感知:软件根据虚拟车辆运动姿态(包括:加减速、转弯、上下坡道、震动、碰撞等)实时驱动动感平台,受训人员运动感知应与实际道路、场地驾驶时相似。
(5)模拟应急功能训练:汽车在行驶中制动突然失效、汽车发生侧滑、汽车突然前轮爆胎、汽车在铁路道口熄火、汽车落水、车辆着火等出现的应急功能。
三、主要配置清单
三、主要配置清单
| 序号 | 部件名称 | 数量 | 单位 | 备注 |
| 1 | 控制台 | 1 | 台 | 含液晶显示器 2 台 |
| 2 | 环形柱幕 | 1 | 幅 | 含机械框架 |
| 3 | 投影机 | 3 | 台 | 含安装吊架 |
| 4 | 服务器 | 1 | 台 | |
| 5 | 客户机 | 2 | 台 | |
| 6 | 六自由度机电动感平台 | 1 | 台 | |
| 7 | 六自由度机电动感平台控制柜 | 1 | 台 | |
| 8 | 驾驶舱 | 1 | 台 | |
| 9 | 打印机 | 1 | 台 | 含机柜 |
| 10 | 大型特种车驾驶模拟训练系统软件 | 1 | 套 | VP运行版授权(Vega Prime、Distributed Rendering、FX、Light Lobes、Vortex)5项模块 |
