 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114ZNL-HJ06型 工业机器人焊接实操工作站
一、概述
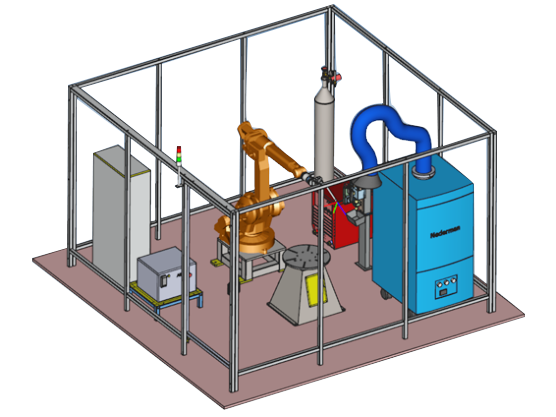
ZNL-HJ06型 工业机器人焊接实操工作站主要开展焊接技术培训,可满足学生动手能力的强化训练,还可作为高级工、技师能力提升的实训设备,能为解决在工作岗位所遇到的技术问题提供有建设性的解决方案,焊接是当前工业机器人应用*广的领域之一,主要面向汽车制造、设备生产等方向。工业机器人的高重复定位精度和稳定的工作状态,可以保证焊接工艺的一致性和高效性,高灵活性使其工作于空间狭小、周边复杂甚至危险的环境中,在车身生产线上已经基本代替人工完成弧焊、点焊等工作,工业机器人焊接实训工作站以真实工厂应用要求为基础,优化功能设计,提高系统灵活度,融入实训教学过程,为具有一定工业机器人基础操作基础的学生提供结合焊接工艺的实训平台。
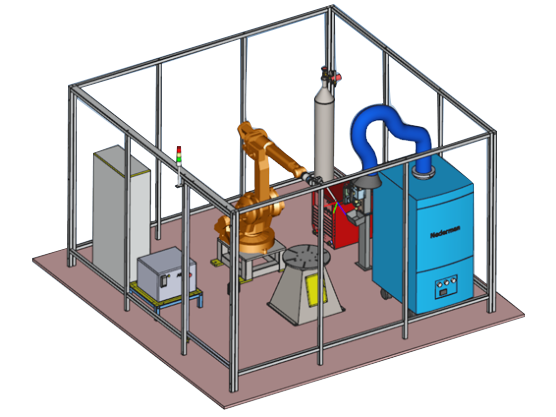
ZNL-HJ06型 工业机器人焊接实训平台由工业机器人、焊接电源、送丝机、焊枪、清枪剪丝站、变位机及工装夹具、工业除烟除尘净化器、安全防护组件及配套设备构成,是利用工业机器人这一柔性执行单元,结合弧焊工艺实现的实际加工单元,可以完成对板型、管型等零件的焊接加工。在学生充分学习工业机器人基础操作后,完全掌握参数设置、轨迹编程等技能基础上,结合焊接工艺完成与真实工厂应用相同的实训项目,了解焊接工作站的构成及维护,缩短岗前培训过程,提高就业竞争力。
二、产品特点
1、烟尘净化单元(吸管安装在工作区域内,能够直接吸走烟尘和飞溅,减少对环境烟尘排放,能防止焊接废气对人体的伤害。)
2、焊接单元(由焊机、送丝机、送丝盘、焊枪、100%工业液体二氧化碳等组成)
3、控制柜单元(主要由PLC、触摸屏、开关电源、等组成)
三、工作站运行环境参数:
1、交流电源:单相 AC 380 V±10% 50Hz
2、工作环境:-10~50℃;环境湿度:≤90%无水珠凝结
3、整机功耗:6kW
4、安全保护措施:安全保护措施:具有接地、漏电压、漏电流保护,安全指标符合国家标准
5、外形尺寸(长宽高):长×宽×高=(4500×4500×2000)mm(±5%)
四、焊接参数:
1、三相380V/50Hz 额定输入功率:14.4KVA 额定输入电流:25A(Imax32A)
2、输出空载电压:93V 输出电压调节范围:14-40v 效率/功率因数:≥89% / ≥0.87
3、气体流量:15-20L/min 使用焊丝直径(mm):Ф0.8、Ф1.0、Ф1.2Ф1.6 主变压器绝缘等级:H
五、工业机器人技术参数:
1、轴数:6轴
2、负载:6kg
3、工作范围:1400mm
4、重复定位精度:±0.1mm
5、防护等级:IP54
6、控制方式:AC伺服控制
7、集成信号源:上臂12路信号,配标准机器控制系统
六、实训项目:
1、工作站结构认知
2、关键设备的特性和参数设置
3、工业机器人及周边设备的维护及典型错误排查
4、工业机器人焊接应用软件的参数设置及工艺规划
5、焊枪TCP参数标定
6、无焊接实现状态下平面简单焊接轨迹的编程
7、结合焊接工艺的简单焊接实训
8、焊接参数(电流、电压、焊接速度)对焊道成型影响的实训
9、平面堆焊实训
10、平板对接实训
11、角焊缝焊接实训
12、坡口对接焊缝焊接实训
13、无焊接实现状态下配合变位机联动的立体焊接轨迹的编程
14、结合焊接工艺的配合变位机联动的立体焊接实训
15、基于RobotArt的工作站模型环境搭建与配置
16、基于RobotArt的简单焊接工艺离线编程应用
17、基于RobotArt的配合变位机的复杂工艺离线编程应用
二、产品特点
1、烟尘净化单元(吸管安装在工作区域内,能够直接吸走烟尘和飞溅,减少对环境烟尘排放,能防止焊接废气对人体的伤害。)
2、焊接单元(由焊机、送丝机、送丝盘、焊枪、100%工业液体二氧化碳等组成)
3、控制柜单元(主要由PLC、触摸屏、开关电源、等组成)
三、工作站运行环境参数:
1、交流电源:单相 AC 380 V±10% 50Hz
2、工作环境:-10~50℃;环境湿度:≤90%无水珠凝结
3、整机功耗:6kW
4、安全保护措施:安全保护措施:具有接地、漏电压、漏电流保护,安全指标符合国家标准
5、外形尺寸(长宽高):长×宽×高=(4500×4500×2000)mm(±5%)
四、焊接参数:
1、三相380V/50Hz 额定输入功率:14.4KVA 额定输入电流:25A(Imax32A)
2、输出空载电压:93V 输出电压调节范围:14-40v 效率/功率因数:≥89% / ≥0.87
3、气体流量:15-20L/min 使用焊丝直径(mm):Ф0.8、Ф1.0、Ф1.2Ф1.6 主变压器绝缘等级:H
五、工业机器人技术参数:
1、轴数:6轴
2、负载:6kg
3、工作范围:1400mm
4、重复定位精度:±0.1mm
5、防护等级:IP54
6、控制方式:AC伺服控制
7、集成信号源:上臂12路信号,配标准机器控制系统
六、实训项目:
1、工作站结构认知
2、关键设备的特性和参数设置
3、工业机器人及周边设备的维护及典型错误排查
4、工业机器人焊接应用软件的参数设置及工艺规划
5、焊枪TCP参数标定
6、无焊接实现状态下平面简单焊接轨迹的编程
7、结合焊接工艺的简单焊接实训
8、焊接参数(电流、电压、焊接速度)对焊道成型影响的实训
9、平面堆焊实训
10、平板对接实训
11、角焊缝焊接实训
12、坡口对接焊缝焊接实训
13、无焊接实现状态下配合变位机联动的立体焊接轨迹的编程
14、结合焊接工艺的配合变位机联动的立体焊接实训
15、基于RobotArt的工作站模型环境搭建与配置
16、基于RobotArt的简单焊接工艺离线编程应用
17、基于RobotArt的配合变位机的复杂工艺离线编程应用
