 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114一、总体功能描述
机器人焊接实训工作站是在多年机器人教学与实验基础上,结合当前焊接自动化实际应用和学校工业机器人教学需求开发研制的。实训工作站采用真实焊接机器人的设计理念,使学员掌握弧焊原理和工艺基础、弧焊机器人的操作、焊接电源的参数调整以及变位机的协调工作、工作站的调试和维护等应用技能;使学员具备机器人焊接岗位和中高级专业人才所必需的基本知识和基本技能,并为提高学员的全面素质、增强适应现代焊接技能岗位的能力打下良好的基础。
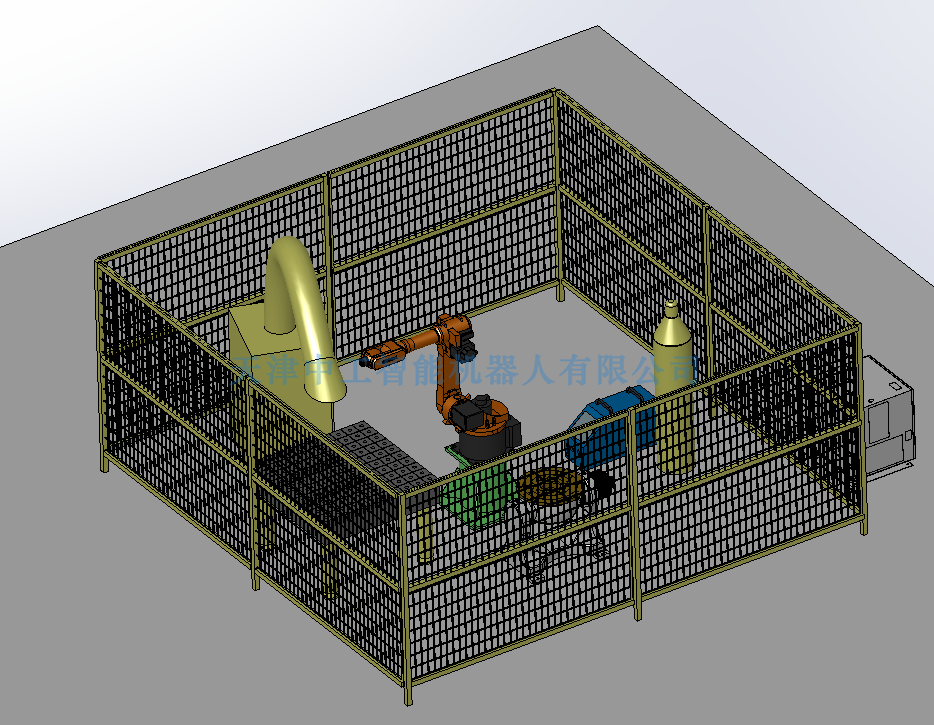
二、产品图片

焊接实训工作站涵盖了工业机器人本体、机器人控制柜及示教器、机器人底座、焊接电源、送丝机、焊枪、二维柔性平台、两轴变变位机、工装夹具、清枪站、空压机等硬件组成。
三、产品参数
(一)广数RB08A3-1490
1、工业机器人参数
1)具有6个自由度,串联关节型工业机器人;
2)重复定位精度:±0.05mm;
3)承重能力:8kg;
4)运动范围: 1490mm;
5)重量: 185 kg;
6)国产机器人,具有自主产权。
2、机器人控制器
嵌入式机器人控制器:基于ARM+DSP+FPGA硬件结构,可支持到10轴,运算速度达到500MIPS,具有高速运动控制现场总线、以太网、CAN以及devicNet任一接口,可实现连续轨迹示教和在线示教,具备远程监控和诊断功能。动力学自适应辨识控制技术:综合考虑机器人运动过程中重力、哥氏力、离心力等外力干扰运用自适应控制技术提高机器人的动态性能。
(二)焊接电源
为保证弧焊工艺效果和教学可操作性,工业机器人焊接应用工作站采用全数字CO2/MAG焊接电源。通过全数字控制,从小电流到大电流,都能对电流状态进行极其精细的控制,实现持续稳定的焊接品质。面板布局简洁,符合用户的使用习惯,操作非常方便。焊接电源采用数字控制IGBT方式,额定输出电流350A,额定负载持续率60%,适合保护气体CO2焊接和MAG焊接
(三)焊枪
整套焊枪系统包括枪颈、枪缆、防撞器、法兰盘和支架臂,具备防碰撞检测功能,当出现撞机时候,系统立即停止,防止对人或机械带来更大的伤害,目前采用的350机用内置气冷焊枪。
(四)自动送丝机
自动送丝机一般由控制部分、驱动部分和送丝嘴等部分组成。
控制部分:采用机器人(工艺包)进行控制,机器人发出相应的数字量信号,具有滞后送丝和提前抽丝、正向送丝、反向抽丝、连续送丝、间断送丝、送丝速度可调等功能。
驱动部分:由电机、可调预紧力压杆、主动轮、从动轮组成。可调预紧力压杆:用于压紧焊丝,把手可旋转调节压紧度。主动轮:电机带动主动轮旋转,为送丝提供动力。从动轮:将焊丝压入送丝轮上的送丝槽,增大焊丝与送丝轮的摩擦,送焊丝平稳的送出。
送丝嘴部分:可以将送丝嘴和焊枪进行相对固定,且能调整送丝的角度以及送丝嘴距离钨极的距离,以保证焊接效果。
出厂配置有0.8mm、1.0mm、1.2mm送丝轮,用户可根据焊丝大小进行调节。
(五)清枪站
为充分模拟工业机器人在工厂真实焊接工艺应用,工业机器人焊接实验工作站配套了焊接专用的自动清枪站。自动清枪站主要是用作清理机器人自动焊接在工作过程中产生的粘堵在焊枪气体保护套内的飞浅物,确保气体长期畅通无阻,有效地阻隔空气进入焊接区,保护焊接溶池、提高焊缝质量。
主要功能有:电气控制清枪、同位置清枪喷油、自动喷油、电气控制剪丝、“喷嘴夹紧打开”信号、“铰刀伸至顶部” 信号、TCP定位点。
(六)二维柔性平台
二维柔性焊接平台,是工业中常见的一种焊接工装台,是一种平面设计具有模块化、柔性化、高精度、重复使用性的焊接工作台,可以应用于工程机械、汽车制造、机器人、船舶、轨道交通等行业。整体尺寸:1000*1000*700mm,采用4根立柱进行支撑,桌面有标准快速公转接口,用户可根据需要快速拼接出不同要求的工装,柔性化的焊接工装免除了设计人员重复设计和制作工装的投入。
(七)焊烟净化器
焊接过程会产生大量焊烟,严重影响教学环境,不利于学生教师的身体健康,为此工业机器人焊接实验工作站配备了焊烟清除设备。焊烟净化器采用小型化设计,特别适合于单工作站形式,无需再铺设大型烟气管道,工作风量4800-5500m³/h、过滤效率99.9%、过滤精度0.1μm满足一般焊接工艺实验教学使用,采用复合型滤网确保清除效果同时提高使用寿命,降低耗材成本。
(八)安全防护栏
安全护栏由铝型材+铁丝网制作,美观且便于观察。采用“前侧设计滑门”的模式,为学生在对机器人电控部分拆装学习时候提供更开阔的空间。 采用欧姆龙工业级安全门锁D4SL-NSH10-LKH。
(九)空压机(气泵)
该实训工作站配置有30L静音无油空压机,采用550w功率纯铜电机,工作电压220V,50HZ,最大压力可达0.8MPa,满足用气需求。
(十)工装夹具
工装夹具采用与二维柔性平台配套,适用于不同的工件组装焊接,可调整,放置焊接变形。
(十一)外围控制系统
外围控制系统,主要由PLC控制器、HMI模块以及低压电器元件等组成,该系统与机器人进行通讯建立和信号交互。可将该系统安放在工作站安全围栏外,在HMI上选择相应的焊接程序,机器人实现不同轨迹的焊接作业,可训练PLC逻辑编程、HMI组态,通讯配置等相关知识技能。
四、可开展的实训项目
1)机器人焊接实训工作站结构认知
2)工业机器人TCP标定与焊接指令操作与编程
3)焊接工艺参数(电流、电压、焊接速度等)设置
4)简单平面焊接轨迹机器人示教编程应用
5)T型角接焊缝轨迹机器人示教编程应用
6)管-板平角焊缝机器人示教编程应用
7)管-板组合件焊接机器人示教编程应用
8)焊接机器人与附件(送丝机、焊枪、清枪站)日常维护与保养
9)管-管(马鞍形)角接焊缝机器人示教编程应用(需要配置变位机)
10)复杂轨迹机器人离线编程焊接应用(需配置离线编程软件)
11)PLC编程、HMI组态、外部启停控制焊接工作站运行(需配置外围控制系统)
五、配置清单
|
序号 |
名称及规格 |
单位 |
数量 |
备注 |
|
1 |
六轴焊接机器人 |
套 |
1 |
配焊接工艺包 |
|
2 |
焊接系统 |
套 |
1 |
焊接电源、送丝机、焊枪等 |
|
3 |
清枪站 |
套 |
1 |
|
|
4 |
二维柔性平台 |
套 |
1 |
工装夹具 |
|
5 |
焊烟净化器 |
套 |
1 |
|
|
6 |
安全防护栏 |
套 |
1 |
|
|
7 |
安装附件 |
套 |
1 |
|
|
8 |
双轴变位机 |
套 |
1 |
选配 |
|
9 |
外围控制系统 |
套 |
1 |
选配 |
