 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114一、总体概述
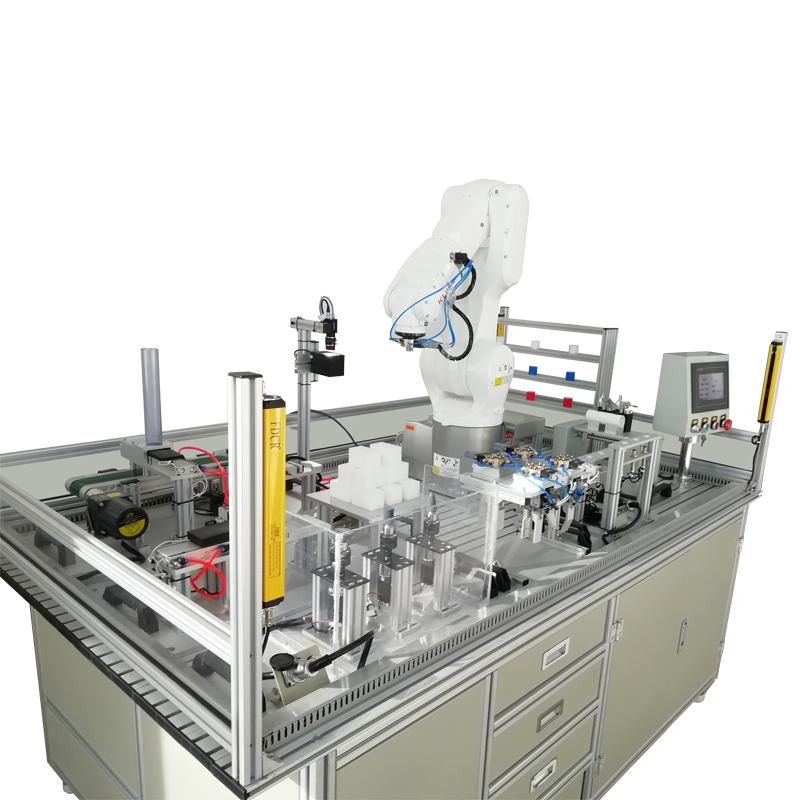
1、ZNX-RB03型工业机器人运用与维护实训平台是工业机器人专业教学训练综合实训设备,采用模块化配置思路,主要包括机器人单元、装配单元、视觉单元、码垛单元、快换工具单元、仓库单元、人机交互单元、PLC 单元、离线编程单元、桌面平台单元以及气泵等。根据训练及考核任务,可快速更换不同模块,实现不同难度不同技能点的考核。系统深度集成了离线编程技术,软件不仅包含硬件平台的三维模型资源,还大大简化了工艺实现的编程过程、提高轨迹复现精度、避免发生碰撞干涉。该工作站不仅满足了职业院校不同专业学生针对工业机器人的操作和编程的教学需求,任务源于工业的特征也使其更加适于作为训考平台。工业机器人操作与运维工作站展示了工业自动化、生产数字化、控制网络化、系统集成化等思想,涉及智能控制技术、工业机器人技术、机电一体化技术、计算机应用技术、软件技术、相机测量技术等领域的知识和技能。
2、ZNX-RB03型工业机器人运用与维护实训平台用于中级到高级工以上的高技能人才在工业机器人相关专业技术应用方面的培训课程的教学、训练和工程实践,包括从单项技术(技能)到综合技术(技能)培训,满足学生动手能力的强化,为解决在工作岗位所遇到的技术问题提供有建设性的解决方案。

二、系统功能
1、突出高(高端职业技能)、新(新兴职业技能)、长(长周期技能开发)、前(前瞻性技能开发);
2、在自控产品结构上包含典型品牌产品;
3. 模块化设计,实训功能可有学员自主搭配;
4. PLC与机器人系统配合使用,实现生产过程的协调运作。
三、技术参数
1. 交流电源:单相 AC 220V±10% 50 Hz;
2. 温度:-10~40 ℃;环境湿度:≤90%(25℃);
3. 整机功耗:≤1.5 kW;
4. 安全保护措施:具有接地保护、漏电保护功能,安全性符合相关的国家标准。采用高绝缘的安全型插座及带绝缘护套的高强度安全型实验导线
5.实验室智能电源安全管理系统:系统由主电路、控制电路、检测保护电路、显示电路、语音报警电路等组成,整个实训室配置一套。主要功能:
★(1)上电前合闸条件检测:输入过压、欠压、对地漏电、过流、任一故障存在不合闸;并且进行语音报警;
★(2)运行检测保护:输入过压、欠压、输出过流、漏电,任一故障出现将自动跳闸,实施保护,并且进行语音报警;保护阀值现场可设置;
★(3)漏电功能测试:按下漏电测试按钮,装置会自动提供一个漏电测试信号,使保护器跳闸,重新进行上电合闸条件检测,语音提示“开机自检中”,故障消除后,实训室总体智能电源管理系统自动合闸,恢复供电。
(4)过压保护:运行中,出现输入过压,实训室总体智能电源管理系统将跳闸,并且对应的“过压”指示灯以红绿色交替显示进行提醒,语音播报“电源过压,请注意”;
(5)过流保护:运行中,三相电流中任一相出现过流,实训室总体智能电源管理系统将跳闸,且对应的“过流”指示灯以红绿色交替显示进行提醒,语音播报“过流,请注意”;
(6)漏电保护:运行中,三相中任一相发生漏电,实训室总体智能电源管理系统将跳闸,并且对应的“漏电”指示灯以红绿色交替显示进行提醒,语音播报“有漏电,请注意”。投标时现场演示带★功能。
6.外形尺寸 长宽高:2100*1200*800mm。
四、实训内容:
1.工业机器人安装、初始化与备份恢复考核项目
2.工业机器人手动控制及基本参数设置
3.工业机器人 IO通信及总线通信
4.工业机器人单轴运动与线性运动控制
5.工业机器人工具 TCP参数标定
6.工业机器人工件坐标系参数标定及多坐标系切换
7.工业机器人多类型工具快速更换
8.工业机器人RFID应用考核项目
9.工业机器人与变位机联合运动控制考核项目
10.视觉传感器的安装、通讯与检测考核项目
11.工业机器人快换工具的技术选型与应用考核项目
12.CCD相机与光源的组成和工作原理考核项目
13.工业视觉颜色识别、尺寸识别、形状识别案例实操考核项目
14.工业机器人与 CCD视觉系统数据通讯应用考核项目
15.系统单元 HMI触摸屏基本编程与调试考核项目
16.组态软件的安装与通信设置考核项目
17.PLC基本编程与调试考核项目
18.PLC与工业机器人网络通讯应用考核项目
19.PLC伺服电机速度位置控制功能的应用考核项目
20.PLC程序故障的设置与排除考核项目
21.PLC程序故障的设置与排除考核项目
22.系统参数故障的设置排除、电气接线故障的设置排除考核项目
23.传感器信号故障的设置排除等考核项目
24.行走轴应用考核项目
五、工作流程:
1、本设备其中几个模块可以组合成自动模式,另外的模块为单独训练模式。
2、搬运模块、码垛模块、为单独训练模块。
3、机器人快换装置及机器人家具为辅助模块。
4、送料、输送带模块、仓储模块、装配模配、视觉检测模块,即可单独实训也可组合成一套自动运行程序,完成一套完整的运行动作。
六、模块配置:
|
序号 |
模块单元 |
数量 |
单位 |
|
1 |
机器人单元 |
1 |
套 |
|
2 |
装配单元 |
1 |
套 |
|
3 |
供料单元 |
1 |
套 |
|
4 |
视觉检测单元 |
1 |
套 |
|
5 |
轨迹单元 |
1 |
套 |
|
6 |
仓库单元 |
1 |
套 |
|
7 |
码垛单元 |
1 |
套 |
|
8 |
快换工具单元 |
1 |
套 |
|
9 |
编程软件单元 |
1 |
套 |
|
10 |
皮带运输单元 |
1 |
套 |
|
11 |
标准实训台单元 |
1 |
套 |
|
12 |
HMI人机交负单元 |
1 |
套 |
|
13 |
PLC控制单元 |
1 |
套 |
|
14 |
供气单元 |
1 |
套 |
|
15 |
云智能实验室安全管理系统 |
1 |
套 |
七、设备各模块主要技术参数
|
序号 |
名称 |
规格参数 |
数量 |
单位 |
|
1 |
标准实训台 |
1、2100mm×1200mm×800mm工业铝型材搭建,钣金表面喷塑处理,带脚轮、脚杯。 2、三色报警灯 1个 3、三联件油水分离器AFC-2000 1套 4、机器人固定座 5、安全光栅 6、电磁阀若干 |
1 |
台 |
|
2 |
机器人单元 |
(1)型号:ABB IRB1200-5/0.9 (2)自由度:6; (3)负载能力:不小于3kg; (4)位置重复精度:0.02mm; (5)垂直工作距离:不小于900mm; (6)水平工作距离:不小于545mm; (7)六轴立式多关节机器人,球形工作范围、开链式结构; (8)六轴采用绝对值伺服电机; (9)J1-J6轴采用谐波减速机; (10)防护等级: IP45; (11)安装方式:任意角度; 2、控制器 机器人控制器采用 ABB IRC5 紧凑型控制器。IRC5 以先进的动态建模技术为基础,对机器人性能实现自动优化,缩短节拍时间、提高路径效率。其编程方式采用灵活的 PAPID 高级语言编程,无论简单还是复杂的程序,都能很快、很简洁的完成。IRC5 还自带诊断功能,一旦发生意外停产,可根据提示迅速解决。 (1)型号:IRC5 紧凑型控制器; (2)尺寸:258×450×565mm; (3)结构:独立全封闭间接冷却方式; 控制轴数:标准 6 轴(最大支持扩展 16 轴); (4)电源要求:AC200-220V±10% 50/60Hz、3φ、5.6KVA。 配套 FlexPendant 机器人示教器,7 寸彩色触摸式显示,具备中英文菜单选项;便携式示教盒,具备操纵杆和键盘、紧急停止等功能。 (1)型号:FlexPendant 示教器 (2)特点:TFT 彩色液晶触摸屏、具备中英文菜单选项; (3)紧急停止开关、示教锁定开关、握杆触发开关; (4)支持惯用左/右手切换 (5)支持 U 盘 (6)维护:诊断软件;恢复程序;带时间标记登录;支持远程服务。 |
1 |
套 |
|
3 |
装配单元 |
功能:由井式送料模块、输送带模块、装配固定模块组成,配置可移动/固定式底板。将工件从送料模块送出到输送带运行至末端由机器人夹取搬运至装配固定气缸上进行装配操作。可实现送料、检测、运输、搬运、装配等实训操作。 井式送料模块有双轴气缸1只、电磁阀1个、磁开关1个、光纤传感器1个。配置标准安装机构。 输送带模块由三相异步电机1个、末端感应传感器及输送带标准配置安装机构组成。 装配固定模块由指夹气缸1只、电磁阀1个、磁开关1个及安装支架组成,标准电气接口。★投标时提供设计图纸 |
1 |
套 |
|
4 |
原料单元 |
功能:放置装配工件,由机器人将此工件原料搬运至装配固定模块上进行装配操作。 M12圆柱形传感器9只,配置标准安装机构及移动式底板,标准电气接口。 |
1 |
套 |
|
5 |
视觉检测单元 |
配备一套海康智能视觉系统,由工业镜头、白色光源、工业相机及监视显示器等组成。用于检测工件的特性,如数字、颜色、形状等,还可以对装配效果进行实时检测操作。通过I/O电缆连接到PLC或机器人控制器,也支持串行总线和以太网总线连接到PLC或机器人控制器,对检测结果和检测数据进行传输。。 |
1 |
套 |
|
6 |
轨迹单元 |
功能:可实现 TCP标定,坐标系建立,不同形状轨迹的示教编程和离线编程。 涂胶模块是将工业机器人对产品装配前的涂胶工艺进行功能抽象化,工业机器人抓持涂胶工具沿涂胶面板上不同轮廓轨迹运动,模拟涂胶工艺,保证工艺真实性同时增加教学可行性和趣味性。 主要由轨迹板、安装支架、移动式底板组成。 |
1 |
套 |
|
7 |
仓储单元 |
功能:立柜式仓库模块可为码垛模块、装配模块成品工件或其他模块工件提供放置空间。主要由移动式底板,安装支架等组成。 |
1 |
套 |
|
8 |
码垛单元 |
功能:由方形井式送料机构、码垛底盘组成,工件由送料机构送出,机器人将工件搬运到码垛底盘上进行码垛操作。 由双轴气缸1只、电磁阀1个、磁开关1个、光纤传感器2个,并配置标准安装机构,移动式底板,标准电气接口。★投标时提供设计图纸 |
1 |
套 |
|
9 |
快换工具单元 |
功能:由4种夹具组成,配合机器人使用作搬运、上料、仓储、轨迹、码垛等用途。 配置快换公头1个、快换母头4个、夹具3套、电磁阀3个,并标准固定机构,移动式底板。★投标时提供设计图纸 |
1 |
套 |
|
10 |
离线编程单元 |
PLC编程软件 组态软件 视觉组态软件
|
1 |
套 |
|
11 |
皮带运输单元 |
3、流水线模块 (1)流水线应用场景与工厂实际物流情况相似; (2)可进行机器人点位示教编程与调试; (3)可根据学习内容不同而设置不同挑选形式; (4)可根据工件不同采用不同的夹取夹具。★投标时提供设计图纸 |
1 |
套 |
|
12 |
HMI交互单元 |
功能:由触摸屏及按钮指示灯组成,对整套系统进行控制及指示作用。 人机界面触摸屏1台、按钮4只,及配备机构安装支架。 |
1 |
套 |
|
13 |
PLC控制单元 |
功能:抽屉抽拉式安装 1、三菱Q系列CPU模块:Q03UDCPU 配电源模块、QJ61BT11N通信模块 2、开关电源 1个 3、单相漏电保护开关DZ47LE32 1个 4、交流接触触器CJX22510 1个 5、熔断器RT18-32+3A溶体 1套 6、继电器MY4N-J24DV+底座 4套 7、绿色接线端子 5个 8、编程线1套 9、变频器1套 10、1-2个分布式I/O 11、支持ProfiNet总线 12、外部按钮控制装置 |
1 |
套 |
|
14 |
气泵单元 |
空气压缩机1台、气动三联件1套及各单元气动回路。 |
1 |
台 |
|
15 |
工件 |
圆柱形外装配工件9个、圆柱形内装配工件9个、方形码垛工件12个、焊接/打磨工件10个 |
1 |
套 |
|
16 |
气电快插模块 |
配置航空插1个,气动快换插头1个,安装在各单元模块上方便快速对接。 |
5 |
套 |
|
17 |
通用电气接口套件 |
电气接口模块、数字量扩展模块、模拟量扩展模块 |
1 |
套 |
八、配套软件及管理系统
(一)云智能实验室安全管理系统
本平台将无线传输、信息处理等物联网技术应用用于自动化远程控制。设备端运行状态、数据参数等上传至云平台。物联网系统的传感层、传输层和应用层关联掌握数据与分析数据。
(1)电压、电流等模拟量数据显示
(2)输入开关监控,输出开关等数字量控制。
(3)远程控制启停状态,给定输出电压值的。
(4)显示输入输出电压值的历史数据
(5)可按照日期、日间进行查询历史数进行查询。
(6)报警信号为PLC主机模拟量采集数值或者开关量可以自由设定,如当模拟量输入超过设定电压时产生报警,通过物联网自动化应用软件将报警信号上传到云平台,通过云平台向设置的终端推送报警信号,每台设备可对应多个终端设备。
(7)通过手机端可以实现远程控制PLC的输出及监视PLC的输入状态变化。
(8)数据显示画面:画面显示输入电压数值,输出电压监控,开关状态输入,开关控制输出,以及云端连接二维码。
(9)联网设置界面:设置现场数据连接云平台后台数据库管理。
★为保证软件正版,投标时提供云智能实验室安全管理系统软件著作权证书原件备。
(二)三维设计软件系统
通过本系统软件了解组成智能制造生产线的电气、气动、PLC等元件的工作原理并对机电系统的设计、分析进行虚拟仿真。通过选择元件利用符合绘制二维回路图或利用三维模型在系统内实现智能制造的动作而进行虚拟仿真。本系统不仅实现工厂的三维仿真使虚拟现实仿真更加逼真,而且把通过仿真验证的控制逻辑单元可用作监视及控制模块,使能够实现并行工程及软件、硬件的并行设计。
仿真基本模块包括:
1、反馈控制和顺序控制系统
2、指示灯的与门(AND)控制
3、物品传送装置
4、单向气缸控制
5、双缸联动控制
6、带式输送装置系统
7、滚筒式输送装置系统
8、指示灯顺序闪烁回路
9、自动控制标记打印操作控制
10、电梯控制
11、气压控制移动装置
12、工业机器人控制
13、带式传送带实习装置
14、气压传动流水线实验装置
★正版软件,投标时提供智能制造生产线虚拟仿真系统软件著作权证书原件备查并现场演示。
(三)教学课件资源
1、工业机器人课程资源
(1)工业机器人的概述:工业机器人的定义、发展与应用、基本组成及技术参数、工业机器人的分类;
(2)工业机器人的机械系统:工业机器人的1轴结构、工业机器人的2轴结构、工业机器人的3轴结构、工业机器人的4轴结构、工业机器人的5轴结构、工业机器人的6轴结构、工业机器人的机身结构、工业机器人的行走结构、工业机器人的驱动装置和传动单元;
(3)工业机器人的运动学与动力学:工业机器人的连杆参数和齐次坐标变换矩阵。
(4)工业机器人的控制系统:工业机器人控制装置、工业机器人驱动装置、工业机器人检测装置;
(5)工业机器人的编程:工业机器人的编程方式、工业机器人的示教编程、工业机器人的编程语言、工业机器人的语言系统结构和基本功能、常用工业机器人编程语言、工业机器人的离线编程、工业机器人的离线编程仿真软件及编程示例;
(6)工业机器人的典型应用:焊接机器人的应用、搬运机器人的应用、码垛机器人的应用、涂装机器人的应用、装配机器人的应用;
(7)提供汽车生产线工业机器人应用的高清视频。
(四)机器人离线编程教学软件(选配)
1、软件简介:
该软件是针对我国机器人教育市场推出的一款离线编程软件,自主研发软件的核心技术,汇集了各个应用领域功能,功能更全面更强大。在工厂企业大量使用的离线编程软件,在国内处于领先水平。
2、产品功能
功能 描述 具体描述 说明
(1)多种模式编程 示教编程和自动生成切割、搬运 教育版
(2)常见不同格式文件支持 可支持常见软件三维数据格式,包括STEP、IGES、X_T 、prt(UG)、prt(pro-E)、CATpart(CATIA)和sldpart(Solid-works)等格式 教育版
(3)生成运动轨迹 根据实体模型中的曲线或曲面生成轨迹 教育版
(4)轨迹优化、调整 可对轨迹进行碰撞、可达性和轴限位检查并显示。可对工作过程进行仿真运行,以便于估算工作节拍。开放图标功能,实现姿态奇异点检测并显示。但对可输出执行代码的机器人模型仅可使用和仿真,对输出的执行代码不起作用。 教育版
(5)标准机器人模型库 具有ABB/Fanuc/Kuka/Yaskawa/Staubli/广数 六种品牌常用型号机器人模型 教育版
(5)标准机器人模型库 具有切割、焊接、雕刻常用工具 教育版
(7)六种机器人程序输出 后置程序支持ABB/Fanuc/Kuka/Yaskawa/Staubli/广数六种品牌机器人程序输出 教育版
(8)CAD特征关联 可支持。但仅仅支持可参数化的CAD模型。 教育版
(9)新建工具 支持新建工具功能 教育版
(10)新建机器人 支持新建机器人功能,可仿真自定义机器人的轨迹运动 教育版
(11)码垛工艺支持 可实现物料搬运码垛工艺仿真,即通过设置工艺过程机器人可抓取模拟物料,从A点抓取后搬运到B点并放下 教育版
(12)机器人工作方式 可抓持工具,也可抓持工件。 教育版
3、产品特色
(1)基于成熟的CAD/CAM软件
基于UG NX,对于已安装了UG的客户,无需安装本软件直接即可打开使用。对于学员,在使用本软件时也可以学习UG三维软件的安装和操作技能。软件界面简单友好,全中文显示,如图2所示。在主菜单、资源列表区和工作区可以完成整个工程的新建、编辑和保存。
(2)工作站资源列表详尽
和工作站相关的机器人、工件和工具等机械布局可以在列表框中显示,路径、目标点、工具TCP等数据全部详细显示在工作区域。
(3)良好的动态交互界面
环境使用户能够轻松、直观地控制机器人。用户可以通过拖动关机角度条设置关节运动,也可以利用虚拟示教器实现直角坐标系运动,也可以拖动机器人三维TCP框架实现复合运动。完美地结合了NX的CAD/CAM编程工具以及敏越科技独特的机器人优化控制算法,能迅速创优质建机器人轨迹,消除了耗时的手动示教过程。
(4)虚拟运动控制
独具特色的虚拟示教器,简洁小巧,功能强大,可实现关节运动和笛卡尔直角坐标系运动,具有点动和连续运动的功能,可实现超限报警显示。能完美地实现ABB、KUKA、Motoman、Fanuc、Staubli、广数机器人真实示教器不同的显示方式,便于虚拟操作和新手入门学习。三维TCP框架,实现机器人任意位置拖动,方便客户编程示教。
(5)位姿点编辑功能直观
直观、灵活的位姿修改功能。实现了轨迹中任意点的旋转和偏移操作,可实时预览显示修改后的机器人姿态和工具方向,直观明了,易于控制。
(6)曲线编辑功能丰富
丰富的曲线编辑功能。借助NX CAD/CAM模块无可比拟的曲线和曲面编辑功能,完美支持复杂三维曲线和曲面加工工艺。一键生成轨迹和添加轨迹,可自动设置法向量和插补距离,并可对轨迹进行局部或整体平滑过渡。
(7)图像处理自动编程,可以拍照、导入图像,设置好参数,软件自动处理生成轨迹。注:教育包只有主控电脑能出程序。
4、技术参数
(1)该软件是一款工业级机器人离线编程软件,它能实现不同型号工业机器人的离线编程和仿真,支持切割、喷涂和雕刻三种工艺。可完美的兼容UG、Soliodworks和Catia等主流三维软件,支持常用的二维和三维数据格式。具有完善的曲线和曲面编辑功能,适合生成和编辑复杂的三维曲线和曲面轨迹,保证在各工业应用领域进行安全可靠地生产制造。
(2)界面简单友好,全中文界面与菜单显示,完美兼容UG NX界面,符合用户使用习惯。在主菜单、资源列表区和工作区可以完成整个工程的新建、编辑和保存。
(3)能满足如ABB、KUKA、FANUC、YASKAWA、GSK、KAWASAKI等不少于6种品牌机器人,同时可扩展其他品牌机器人,亦可以根据客户的需求进行定制化开发。软件支持变位机和水平导轨,能支持至少三个外部联动轴。
(4)良好的动态交互界面。RobotSmart环境使用户能够轻松、直观地控制机器人。用户可以通过拖动关节角度条设置关节运动,也可以利用虚拟示教器实现直角坐标系运动,也可以拖动机器人三维TCP框架实现复合运动。RobotSmart实美地结合了广泛流行使用的CAD/CAM编程工具以及敏越科技独特的机器人优化控制算法,能迅速优质建机器人轨迹,消除了耗时的手动示教过程。
(5)软件支持虚拟运动控制。软件配备虚拟示教器,简洁小巧,功能强大,可实现关节运动和笛卡尔直角坐标系运动,具有点动和连续运动的功能,可实现超限报警显示。能完美地实现如ABB、KUKA、FANUC、YASKAWA、GSK、KAWASAKI等不少于6种机器人真实示教器不同的显示方式,便于虚拟操作和新手入门学习。三维TCP框架,实现机器人任意位置拖动,方便用户编程示教。
(6)多种工件标定方式。具有单点标定、两点标定和三点标定方式,实现实际工件和虚拟工作站中完美对应。同时支持三点新建工作坐标系的标定方式,和其他主流软件和机器人主机厂家兼容,符合客户操作习惯。
(7)直观、灵活的位姿修改功能。实现了轨迹中任意点的旋转和偏移操作,可实时预览显示修改后的机器人姿态和工具方向,直观明了,易于控制。多种编辑方式,虚拟示教器、三维TCP框架拖动、对话框手动输入。
(8)丰富的曲线编辑功能。借助广泛流行使用的 CAD/CAM软件强大的曲线和曲面编辑功能,完美支持复杂三维曲线和曲面加工工艺。一键生成轨迹和添加轨迹,可自动设置法向量和插补距离,并可对轨迹进行局部或整体平滑过渡。
(9)完善的外部轴控制功能。支持水平导轨和外部旋转轴,最多同时支持一个导轨和两个变位机的外部三轴联动控制。
(10)支持三维曲线切割、三维工件表面处理、雕刻、喷涂等工艺。
(11)可实现工业机器人物联网,具备信息化通讯模块,实时获取工业机器人运动参数;
(12)软件提供强大的二次开发接口和个性化定制功能,支持用户个性化定制软件运行界面信息。
(13)具有图像处理自动编程功能;可以通过拍照导入图像,设置好参数,软件自动处理生成轨迹。
★为保证软件正版,投标时提供机器人离线编程教学软件著作权证书原件备查。
