 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114
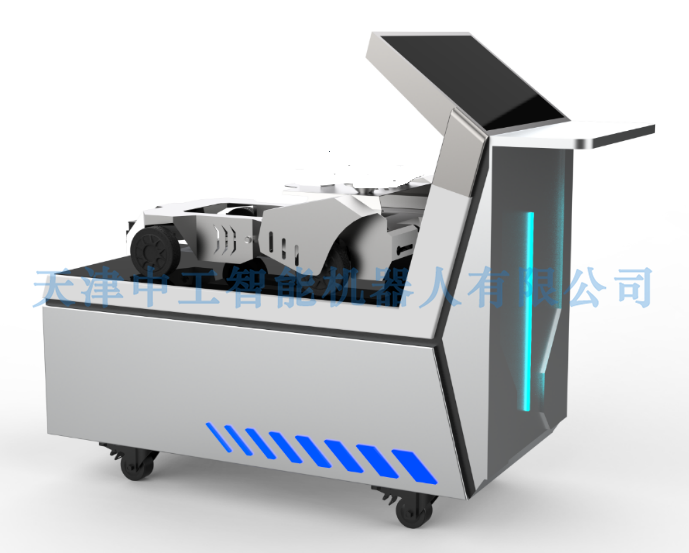
一、实训台介绍
实训台采用汽车造型,配备多种主流毫米波雷达传感器。学生可通过实训台学习毫米波雷达的形态、构造、安装方式。使用设备内置的软件,可学习毫米波雷达测距工作原理和特性,了解毫米波雷达数据及协议,完成传感器标定、障碍物探测等功能。实训台适用于中高等职业技术院校、普通教育类学院和培训机构对系统理论和维修实训的教学需要。
二、设备参数
1、主毫米波雷达
1)工作频率范围:76GHz - 77GHz;
2)探测距离范围:0.2m - 250m;
3)距离测量分辨率:远距±1.79m;近距±0.39m
4)距离测量精度:远距 ±0.40m;近距 ±0.10m
5)测角范围: 120°
6)速度范围:-400 km/h...+200 km/h (- 去向目标... + 来向目标)
7)速度分辨率:远距 0.37km/h,近距 0.43km/h
8)速度精度:±0.1 km/h
9)探测目标类型:远离目标、靠近目标、静止目标、横穿静止目标、横穿目标;
10)提供CAN/CANFD数据输出,至少包含跟踪目标ID、距离、速度、RCS等信息;
11)工作温度至少满足:-40℃-85℃;
12)工作电压:9-16V;
13)防护等级:不低于IP67
2、盲区监测毫米波雷达
1)发射频率:24GHz
2)发射功率(EIRP) :20 dBm
3)更新率:20Hz
4)功耗:1.65W @12V DC 25℃
5)测距范围:乘用车0.1 30 m
6)测距范围:行人 0.1 20 m
7)距离精度:0.1 m
8)测速范围:-16 16 m/s
9)速度分辨率:0.24 m/s
3、计算单元:
1)CPU:不低于6核12线程,主频不低于2.9G,三级缓存不低于12M;
2)GPU:显存频率不低于1590MHz,显存类型不低于 4G DDR6;
3)内存:不少于8GB LPDDR4x2666MhZ
4)存储:固态硬盘,不少于250GB
三、设备功能
1、系统提供人机友好交流界面,可实时更改雷达参数设置,观测调试效果。
2、可准确识别静态与动态障碍物,显示距离、速度、位置等数据。
3、可以设置毫米波雷在x,y上的坐标值,实现外部参数的标定,显示标定后的毫米波检测图像,修改x,y坐标后可以看到障碍物相对于坐标原点的变化;检测结果可通过ROI区域设置,实现需求区域障碍物检测过滤。
4、可实现盲区监测功能,并用相应指示。
四、实训内容
1. 毫米波雷达基础认知与原理
2. CAN盒的作用与连接方式
3. CAN的配置使用
4. 毫米波调试软件操作实验
5. 毫米波雷达的基本配置
6. 显示设置与雷达数据
7. 盲区监测功能测试
