 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114
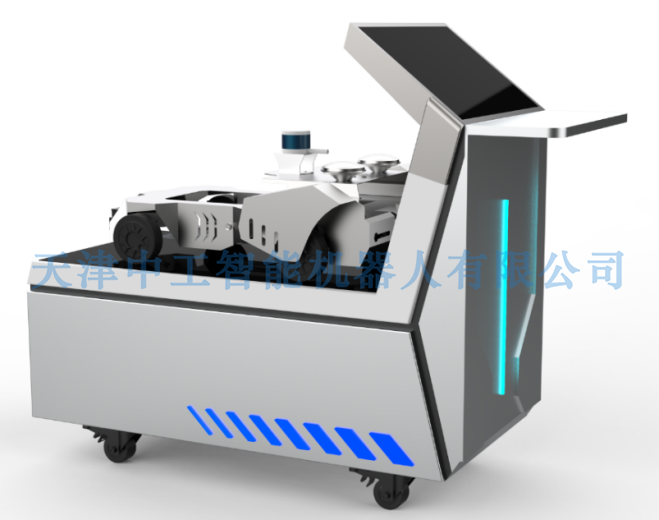
一、实训台介绍
实训台采用汽车造型,配备多种主流激光雷达传感器。学生可通过实训台学习激光雷达的形态、构造、安装方式。使用设备内置的软件,可学习激光雷达测距工作原理和特性,了解激光雷达点云数据及协议,完成障碍物探测和环境地图构建等激光雷达功能。实训台适用于中高等职业技术院校、普通教育类学院和培训机构对系统理论和维修实训的教学需要。
二、实训台配置
1、16线激光雷达
扫描通道:16线
激光波长:905nm
探测距离: 70 米~200 米
供电范围:9V-36VDC
通信接口:以太网 pps
采集数据包含三维空间坐标与点云反射率等信息
2、单线激光雷达
适用场景:适合室内外环境,可靠的抗日光能力
测量距离:白色物体0.05~30m (90%反射率);黑色物体0.05~10m (10%反射率);
俯仰角: 0°~1.5° (特殊范围需求可定制)
采样频率:32kHz
扫描频率:10Hz
角度分辨率:0.12°
通讯接口:Ethernet
测量精度:±30mm*
测距分辨力:13mm
3、固态激光雷达
线数:192
极限探测距离:300m
室外有效距离/100klux, 10%反射率:150m
测距精度:3cm(1σ )
水平视场角:120°
水平角分辨率:0.167°
竖直视场角:25°
竖直角分辨率:0.13°
扫描速率:10Hz/20Hz
激光波长:905nm
激光器等级: Class 1 人眼安全
工作温度 -40~85℃
4、计算单元:
CPU:不低于6核12线程,主频不低于2.9G,三级缓存不低于12M;
GPU:显存频率不低于1590MHz,显存类型不低于 4G DDR6;
内存:不少于8GB LPDDR4x2666MhZ
存储:固态硬盘,不少于250GB
三、教学点
通过上位机软件设置激光雷达参数,包括以太网、时间、电机参数等;接收激光雷达数据流,可视化显示点云。
可以通过软件设置激光雷达的外部参数x,y,z的值和俯仰角,航向角,翻滚角的值进行标定;
通过激光雷达感知算法控件,通过调节探测范围、滤波阀值、分割参数等参数,改变点云识别状态并对障碍物进行标识,实现对激光雷达识别算法的理解;可以测出障碍物与试验台自身的真实距离。
设置安全区域,安全区域内障碍物将被标志识别。
多种数据源输入,可调用激光雷达实时数据,录制的数据包、仿真实训台输出点云。
四、实训内容
激光雷达基本认知与原理
激光雷达的选型
激光雷达的安装与电气接口
激光雷达的配置
激光雷达多种数据源实验
障碍物识别实验
激光雷达的外参标定
