 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114
一、平台介绍
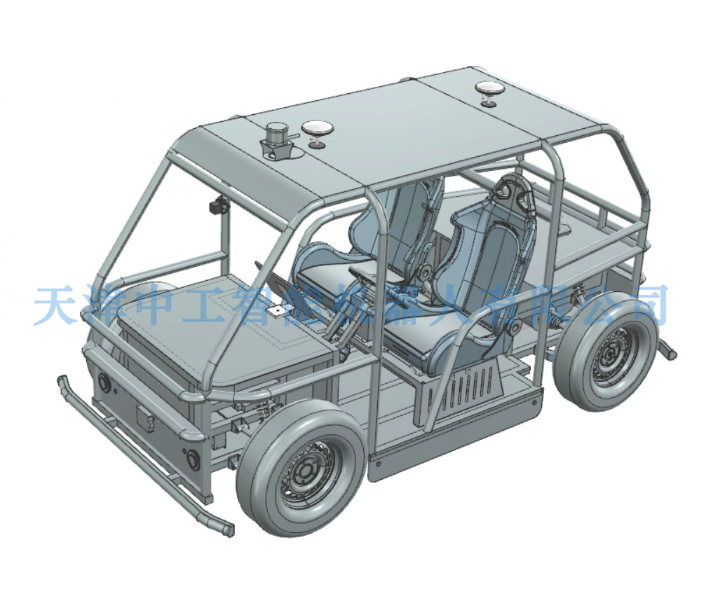
1.智能网联人机共驾实训车,采用专业配件组装为双座线控车辆,加装可实现Robot Taxi的自动驾驶系统,以实物教学方式,向学生展示行业内专业的智能网联汽车线控技术及自动驾驶技术。
2. 线控底盘采用已量产的线控VCU控制,实现很高的线控性能,在控制精度、控制误差、响应时间、反馈精度等指标均达到领先水平;
3. 对功能安全有充分考虑。通过加速踏板、制动踏板和方向盘均可以实现人工接管,退出自动驾驶模式,具备系统掉电情况下自动切换到常规驾驶模式的功能。并加入系统紧急断电装置,并在断电后自动切换到常规驾驶模式。CAN通信机制上,也有多重安全保证手段,如冗余的控制校验方式保证指令正确,对非预期的上位机换挡指令的限制以保证行驶和车辆安全,高速转向的软件限制策略等。
4. 自动驾驶智能车采用全套自主开发的自动驾驶软件,传感器应用涉及摄像头、激光雷达、毫米波雷达、超声波雷达、GPS/IMU;功能算法主要为感知算法及障碍物行为预测;定位算法采用激光定位为主,RTK定位为辅的方式,避免楼宇、树木对信号遮蔽进而影响车辆运行;可满足人车混流路况的定制化规划控制算法,能实现完成主动循迹、障碍物识别、主动刹车、站点停靠、局部路径规划等功能。
二、线控底盘
1. 总体
1)外形尺寸(mm):2840*1340*1556
2)轴距 (mm):2000
3)前/后轮距 (mm):1400/1400
4)最小转弯半径(m):4.5m
5)续航里程:80km
6)整车质量:300kg
7)最高车速:40km/h
8)电机类型:永磁同步电机
9)电机最大功率:3kW
10)电机最大扭矩:≥45Nm
11)电池类型:磷酸铁锂电池
12)电池容量:≥8kW·h
13)驱动形式:后置后驱
14)制动器类型:前后盘式
2. 线控油门
实现纵向驱动功能的线控控制,并提供相应的CAN控制接口油门踏板开度(单位:%)。
工作车速范围0到40km/h。
线控油门能够单独使能和被接管。可以设置通过油门踏板触发整车被接管(前提是线控油门已使能)。
反馈线控油门状态、油门踏板位置实际值、油门踏板位置指令值。
3. 线控刹车
1)实现纵向行车制动功能的线控控制,并提供相应CAN控制接口制动踏板开度(单位:%)。
2)工作车速范围0到40km/h。
3)建压时间(ms@10MPa):≤200ms
4)最大输出压力(Mpa):100bar@23.81
5)制动主缸直径(mm)Φ23.81
6)电动缸排液量(ml):11 ~ 14
7)电动缸空行程1.5mm
8)线控刹车能够单独使能和被接管。可以设置通过刹车踏板触发整车被接管(前提是线控刹车已使能)。
9)反馈线控刹车状态、刹车踏板位置实际值、刹车踏板位置指令值。制动灯根据制动踏板控制指令自动点亮。
4. 线控转向
1)实现转向功能的线控控制,并提供相应的线控CAN控制接口方向盘转角(单位:deg)。
2)要求能够在0到40km/h范围内实现转向控制。
3)方向盘转角范围-450deg到450deg(或不低于原车机械结构允许的最大转角)。
4)▲最大转向速率不低于360deg/s。
5)齿条行程±80mm
6)线角传动比50.27mm/rev
7)最大输出齿条力:6~10KN
8)转向轴最大载荷:1000~1500Kg
9)响应时间:<50ms
10)线控转向能够单独使能和被接管。可以设置通过转向盘触发整车被接管(前提是线控转向已使能)。
11)反馈线控转向状态、方向盘转角实际值、方向盘转角指令值。
5. 线控档位
1)▲实现档位切换的线控功能,即在车辆静止状态下可以通过CAN接口使档位在R、N、D间切换。
2)▲安全性要求:出于安全性考虑,原车档杆(或旋钮)位置必须处于N档位置才允许线控档位控制,即(1)必须将档杆置于N档才能进入线控档位控制;(2)进入线控档位控制后,将档杆从N档拨到D或R则自动退出线控档位控制,切换到手动驾驶模式并退出线控。
3)线控档位能够单独使能和被接管。可以设置通过档杆退出N档触发整车被接管(前提是线控档位已使能)。
4)响应时间(从发送指令到完成动作)2s内。
5)反馈线控档位状态、档杆位置实际值、档杆位置指令值。
6. 线控声光
实现左右转向灯、远近光灯、双闪灯、喇叭的开关控制,并提供相应的CAN控制接口。
线控声光能够单独使能,但不能用于接管。
7. 线控模式
线控系统工作模式包含手动模式和自动模式。手动模式下,车辆完全由驾驶员控制,自动模式下,车辆各线控子系统中的一个或多个由智能驾驶上位机控制,其余仍由驾驶员控制。通过整车线控使能标志位控制整车在手动模式和自动模式之间切换。
反馈整车线控状态。
系统上电默认手动驾驶模式,出现严重故障情况下自动切换常规驾驶模式。
8. 线控接管
系统可以设置并实现通过油门、刹车、转向、档位中的任何一种或几种实现从线控模式接管。
三、自动驾驶配置
1、计算单元
1)CPU: 6核12线程,主频2.5G,三级缓存18M;
2)GPU: 独立图像处理器,CUDA处理器数量3584,显存频率15Gbps,显存容量 12G DDR6;
3)内存:16GB LPDDR4x2666MhZ
4)存储:固态硬盘500GB
5)接口:网络为千兆以太网+WiFi, USB3.0
2、前视摄像头
1)传感器类型 CMOS, 全局快门
2)传感器型号 IMX430
3)像元尺寸 4.5 μm × 4.5 μm
4)靶面尺寸 1/1.7"
5)分辨率 1624×1240
6)帧率 50 fps
7)动态范围 72.08 dB
8)信噪比 43.8 dB
9)增益 0 dB ~ 24 dB
10)曝光时间 1 μs ~ 10 sec
11)快门模式 支持自动曝光、手动曝光、一键曝光模式
12)像素格式 Mono 8/10/12;Bayer RG 8/10/10p/12/12p;YUV422Packed, YUV422_YUYV_Packed;RGB 8, BGR8
13)镜像 支持水平镜像、垂直镜像
14)缓存容量 128 MB
15)电气特性
16)数据接口 GigE
17)数字I/O 6-pin Hirose 接头提供供电和 I/O: 1 路光耦隔离输入(Line0), 1 路光耦隔离
18)输出(Line1), 1 路双向可配置非隔离 I/O(Line2)
19)供电 电压范围 9 ~ 24 VDC,支持 PoE 供电
20)典型功耗 <3.6 W@12 VDC
3、32线激光雷达
扫描通道:32线
激光波长:905nm
探测距离: 70 米~200 米
供电范围:9V-36VDC
通信接口:以太网 pps
采集数据包含三维空间坐标与点云反射率等信息
4、固态激光雷达
波段:1,550 (± 25) nm;
探测距离:1.5 m ~250 m(@10%);
精度:2 cm;
水平视场角:120°;
垂直视场角:25°(+12.5°);
角度分辨率(水平*垂直) :0.10368° 0.2°;
帧率:10 FPS;
测点速宰:148万点/秒;
通信接口:工业以太网;
时间来源:GPS/PTP/gPTP;
5、组合定位单元
支持 RTK 模式、 GNSS 单点模式、三模七频定位方式(GPS、 BDS、 GLANESS);
内置6轴IMU
姿态精度: 0.1°(基线长度≥2m)
定位精度:单点L1/L2: 1.2m;DGPS: 0.4m;RTK: 1cm+1ppm
输入电压 9~32V DC(标准适配12V DC)
功耗 <5W(典型值)
6、毫米波雷达
工作频率范围:76GHz - 77GHz;
探测距离范围:0.2m - 250m;
距离测量分辨率:远距±1.79m;近距±0.39m
距离测量精度:远距 ±0.40m;近距 ±0.10m
速度范围:-400 km/h...+200 km/h (- 去向目标... + 来向目标)
速度分辨率:远距 0.37km/h,近距 0.43km/h
速度精度:±0.1 km/h
探测目标类型:远离目标、靠近目标、静止目标、横穿静止目标、横穿目标;
提供CAN/CANFD数据输出,至少包含跟踪目标ID、距离、速度、RCS等信息;
工作温度至少满足:-40℃-85℃;
工作电压:9-16V;
防护等级:不低于IP67
7、超声波雷达
工作电源: +12V~24V
工作温度范围: -40℃~+85℃
超声波测距范围: 130mm―5000mm, 探头测量测量距离可调
精度:探测距离的 0.5%
分辨率: 5mm
通信接口: 兼容 CAN2.0A CAN2.0B
采样率及发送周期: 100ms
探头发射角: 60 度
8.路由器
支持频段:4G 全网通
天线:双天线
网络接口:4个自适应 100/1000 Mbps LAN口
供电: 12V
无线网络标准:2.4GHz/5GHz双频
9.CAN收发器
集成两路CAN
具有静电防护、 浪涌防护; 通讯隔离
工作温度 工业级: -40~85℃
配置方式:网页版配置界面
四、平台功能
1、车辆提供全套自动驾驶系统,要求车辆能在系统下正常行驶;
2、自动驾驶系统可实现依靠高精地图进行L4自动驾驶功能,并可实现主动循迹、障碍物识别、主动刹车、站点停靠、局部路径规划等功能;
3、提供车辆行驶参数的设置控件,可对自动驾驶系统的形式策略进行调整;
4、自动驾驶系统具备生成高精地图信息源的程序,可录制点云数据包,并可使用地图制作软件制作高精地图;
5、提供各种传感器单独应用的实训软件,可对传感器进行逐一教学;
6、自动驾驶系统结合多种定位技术,可在室内实现循迹或依靠高精地图行驶。
五、配套软件
1、视觉测试软件
软件包含车辆和行人识别模块、车道线识别模块、红绿灯识别模块,可快速进行摄像头的安装、标定、调试工作,以及数据集的采集、数据集的处理、训练工作。
2、毫米波/超声波雷达测试软件
毫米波/超声波雷达测试,包括探测距离和范围等;接收毫米波/超声波雷达数据流,观察不同工况下的目标物情况;故障信息读取。
3、激光雷达测试软件
接口测试;激光雷达配置,包括以太网、时间、电机参数等;接收激光雷达数据流,可视化显示点云。
4、组合导航测试软件
接口测试;组合导航标定,包括初始对准、导航模式配置、坐标轴配置、端口输出数据配置等;接收组合导航数据信息;故障信息读取。
六、实训内容
1)小车总体组成认知实训
2)摄像头与激光雷达原理及标定实训
3)激光雷达上位机基本使用实训
4)激光雷达接口设置实训
5)雷达网络通讯模式的参数配置及算法实训
6)小车传感器软件操作实训
7)自动驾驶界面认知与操作实训
8)小车感知与规划参数配置实训
9)制作点云地图实训
10)打点循迹实训
