
 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114ZN-ARA462型 工业机器人
一、概述
ZN-ARA462型 工业机器人是一款专门针对桌面拾取安装应用而开发的机器人,ZN-ARA462型 工业机器人可广泛用于医疗药品、实验室自动化、消费类产品、工业产品、电信、制药、包装、半导体、电子等行业领域。依托公司多年伺服控制的技术积累,使用自主研发的控制技术,巧妙地运用伺服电机的性能,在高转矩工况下可带6Kg负载,在高转速的工况下电机转速可高达5000转,1、2轴串联臂长达600MM。具有高速度、高性能、高精度、体积小、运动灵活和低价格的优势。其串联的第一轴和第二轴类似于人的手臂可快速在平面内进行定位和定向,可以伸进有限空间中作业后收回。
 二、优势特点
二、优势特点
(一)高性能
1、快
高速循环时间使零部件吞吐量得到提升
出色的加/减速度,匹配平稳的启动/停止时间
高速循环时间低至0.4S,使零部件可快速、准确地运行
负载高达6Kg,额定负载为2Kg,即使负载增加,也可保持高速循环
2、准
精密的机械加工,多道加工工序,完善的装配管控
使用国外先进的成套测量标定设备DYNALOG进行轨迹精度测试,严格精度把关
第1、2关节重复定位精度±0.02MM,第3关节重复定位精度±0.01MM,第4关节重复定位精度±0.01度
出厂前稳定性测试长达7*24小时以上,保证质量的稳定
(二)易使用
1、丰富的用户接头,本体内部走线集成了伺服电机动力线和编码线以及方便用户使用的DB15接头、三个φ6的气管接头,既保持整体外观,也方便夹具接线应用
2、3轴丝杆中空设计,用户气管可直通底部,安装吸盘即可实现拾取
3、轻松拖曳即可推动机器人进行示教,定位记录更加准确方便
三、技术参数
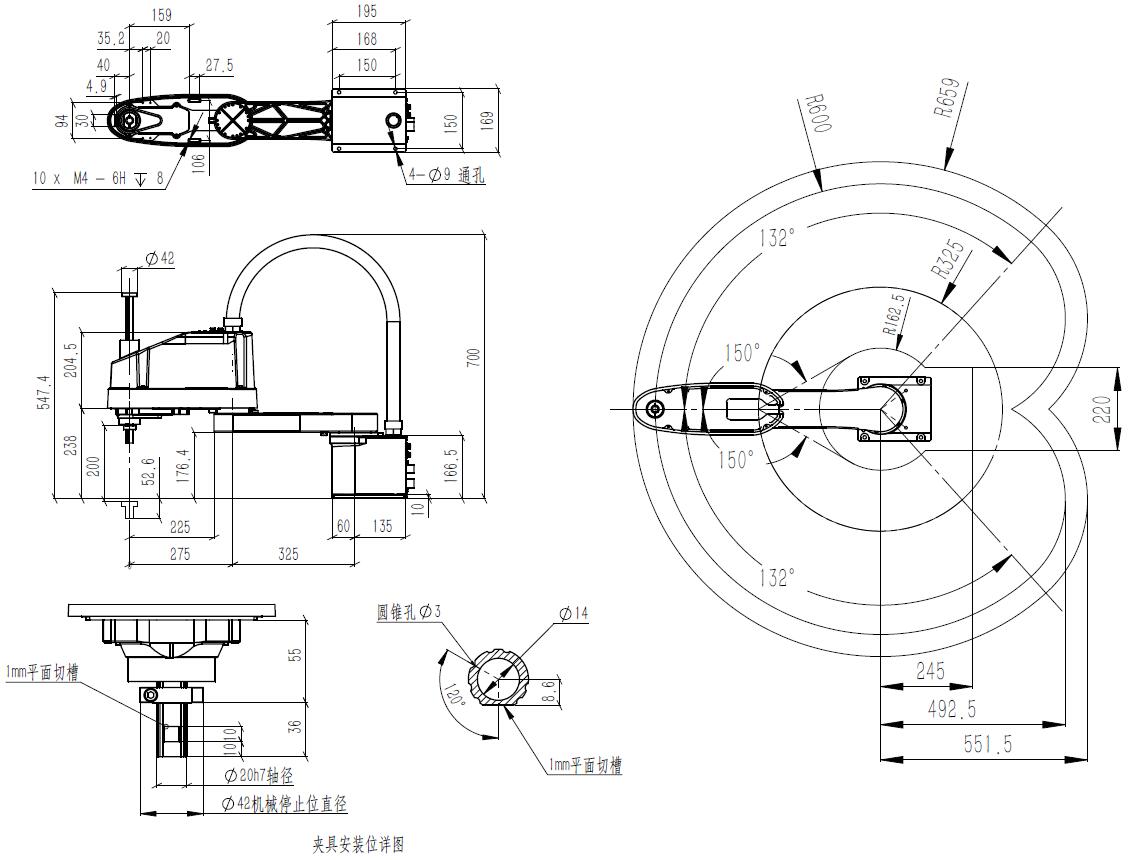
四、工业机器人参数图
(一)高性能
1、快
高速循环时间使零部件吞吐量得到提升
出色的加/减速度,匹配平稳的启动/停止时间
高速循环时间低至0.4S,使零部件可快速、准确地运行
负载高达6Kg,额定负载为2Kg,即使负载增加,也可保持高速循环
2、准
精密的机械加工,多道加工工序,完善的装配管控
使用国外先进的成套测量标定设备DYNALOG进行轨迹精度测试,严格精度把关
第1、2关节重复定位精度±0.02MM,第3关节重复定位精度±0.01MM,第4关节重复定位精度±0.01度
出厂前稳定性测试长达7*24小时以上,保证质量的稳定
(二)易使用
1、丰富的用户接头,本体内部走线集成了伺服电机动力线和编码线以及方便用户使用的DB15接头、三个φ6的气管接头,既保持整体外观,也方便夹具接线应用
2、3轴丝杆中空设计,用户气管可直通底部,安装吸盘即可实现拾取
3、轻松拖曳即可推动机器人进行示教,定位记录更加准确方便
三、技术参数
| 工业机器人 | ZN-ARA462 | |
| 自由度 | 4 | |
| *大负载/额定负载 | 6Kg/2Kg | |
| *大工作半径 | 600mm | |
| 重复定位精度 | ±0.02mm | |
| 运动范围 | J1 | ±132° |
| J2 | ±150° | |
| J3 | 0-200mm | |
| J4 | ±360° | |
| 额定速度 | J1 | 225°/s,3.92rad/s |
| J2 | 360°/s,6.28rad/s | |
| J3 | 666mm/s | |
| J4 | 1200°/s,20.93rad/s | |
| *高速度 | J1 | 375°/s,6.54rad/s |
| J2 | 600°/s,10.46rad/s | |
| J3 | 1111mm/s | |
| J4 | 2000°/s,34.88rad/s | |
| 容许惯性矩 | J4 | 0.12kg㎡/0.01kg㎡ |
| 容许扭矩 | J4 | 4.23Nm |
| 适用环境 | 温度 | 0~45° |
| 湿度 | 20%~80% | |
| 其他 | 避免与易燃易爆或腐蚀性气体、液体接触,远离电子噪声源(等离子) | |
| 示教器线缆长度 | 选配(若需配置,示教器线缆长度为8米) | |
| 本体-柜体连接线长度 | 3米 | |
| I/O参数 | 数字量:32输入,31输出(控制柜故障指示灯输出占用1) | |
| 电源容量 | 0.8kVA | |
| 额定功率 | 0.6kW | |
| 额定电压 | 单相AC220V | |
| 额定电流 | 3.2A | |
| 防护等级 | IP54 | |
| 安装方式 | 地面安装、桌面安装 | |
| 本体重量 | 21kg | |
| 控制柜防护等级 | IP53 | |
| 控制柜尺寸 | 500(宽)×270(厚)×530(高)-可立可卧 | |
| 控制柜重量 | 38KG | |
